
This was one of the questions posed to the IOA M&I Group panel earlier this year at the ‘Ask the Instrumentation Expert’ meeting reported on in the last IOA bulletin. This seems to be one area of genuine innovation in sound level meters, and we have received several requests to expand on the subject, hence this article.
On the committee, we have a few members with expertise in the subject, so we put our heads together to tease out some of the issues.
What is a MEMS microphone?
MEMS stands for Micro Electro Mechanical Systems, and the title covers all miniature devices with mechanical parts, including mirrors, gears and of course sensors. Sensors are available for measurement/sensing of sound and vibration, and they all have in common the manufacturing technique which typically involves a silicon wafer fabrication process. The main advantage is size, and cost saving through volume manufacturing, and you will find them in inkjet printers, tyre pressure sensors, gyroscopes and of course microphones.
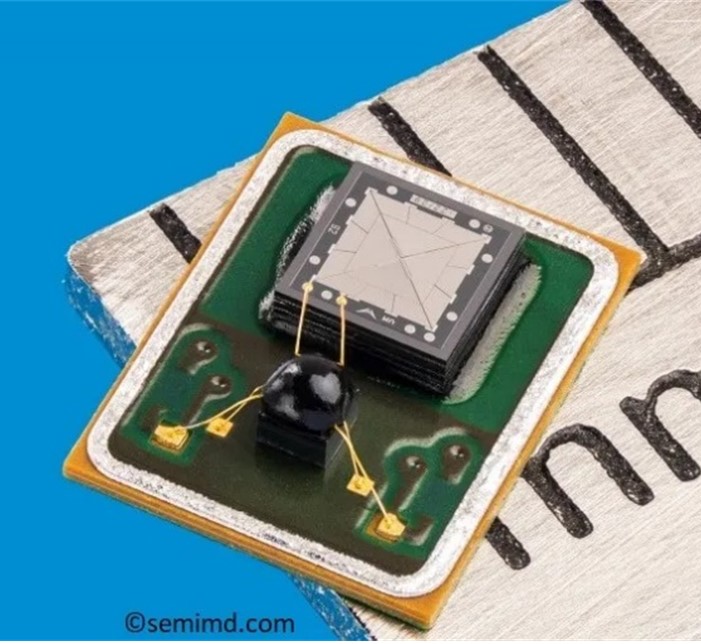
Figure 1: A typical MEMS sensor chip
In principle, a MEMS microphone is no different to the traditional condenser microphone, in that it’s a capacitor. The incident sound will cause a variation of the capacitance, which we can use to sense the variation in pressure.
Because the sensing element is so small, even with some complex designs of etching, the sensitivity of the microphone is low, around 7-8mV/Pa (this compares to a traditional ½” microphone at 50mV/Pa)
However, this is more than enough for the applications for which it has been designed. These include mobile phones, headsets, headphones, wearable devices and home smart devices. In fact, your typical smartphone will contain several MEMS microphones, to help with noise cancellation and source location.
Sometimes, you will hear the term ‘digital microphone’. This will be a package, which contains the microphone itself, with its conditioning (preamp) and on-chip analog-digital conversion. In other words, sound goes in, digits come out. This has implications later on when we come to calibration.
The manufacturing process ensures massive volume, repeatability, reliability and low cost. Compare that to a traditional measurement microphone which will essentially be hand-built in very low volumes.
Characteristics of MEMS microphones
The main considerations of microphone performance are: –
- Frequency Response
- Level measurement range
- Directional characteristics
- Environmental stability
Frequency Response
The response of a MEMS microphone shows a low frequency roll-ff, anywhere between 20-100Hz, a linear pass band, and then a high frequency resonance, anywhere between 20-50kHz
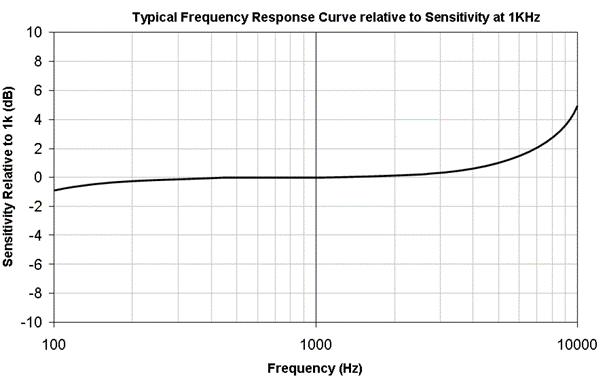
Figure 2: Frequency response of a typical MEMS microphone
The low frequency roll-off is useful for wind-noise and sibilance reduction, and the high frequency resonance is a function of the size of the sensing port and packaging, as well as the silicon structure. You could make a comparison here with a piezoelectric accelerometer which shows similar HF behaviour.
For use as a measurement transducer, both of these have to be controlled, either with acoustical filtering or digital signal processing. However, controlling resonances eats into dynamic range and noise floors.
The choice of analog or ‘digital’ MEMS microphones is salient here, the latter requiring the use of digital filtering, which may have power supply implications.
Level Measurement Range
MEMS microphones typically have an upper limit of sound pressure level of around 130dB, and a noise floor around 30-40dB, so clearly inferior to a condenser microphone, where we are used to making measurements from 20dB up to 145dB in one hit. Depending on the application, this may not be a killer, but careful design is required.
Linearity is excellent over the quoted measurement range.
Directional characteristics
Measurement microphones are designed to be as omnidirectional as possible, and this depends on the physical dimensions of the capsule being presented to the acoustic field. We are familiar with the difference between free-field and pressure microphones, and we also can choose between sizes of microphone depending on desired frequency range. The MEMS microphone therefore needs to be packaged to simulate the ‘normal’ characteristics, while allowing for the fact that the sound takes a more tortuous path to the sensor element.
Environmental Stability
Early MEMS microphones tended to be sensitive to temperature and humidity, such that a temperature sensor was included to allow corrections to be made. Modern devices are now very stable with temperature and generally require no correction. As with conventional condenser microphones, field of application and packaging (e.g. weather protection) must be considered carefully anyway.
Fields of Application
The first application of a MEMS microphone for standardised metrology was in the SV 104 noise dosimeter, where key requirements were cost and ruggedness. As dosimeters are used for high level measurements, the limitation of the MEMS approach was the upper limit, which needs to be in excess of 140dB to cover the full requirements of measurements for noise at work. All current MEMS devices are well into distortion at these levels, so it is necessary to design a purely acoustical/mechanical ‘pre-attenuator’ (patented) as part of the packaging, so the MEMS device operates within its linear range.
This has implications for the bottom of the measurement range, but dosimeters are built to the applicable standard, IEC 61252:1993/AMD2:2017, and not the sound level meter standards.
The packaging also includes simulating a ½” microphone casing, allowing traditional sound level calibrators to be used.
MEMS microphones are now also being used in Smart City and transportation applications, where the low price allows large sensor arrays to be deployed. In this application, the noise level variation with time is arguably more important than absolute accuracy, although the networks can be ‘calibrated’ by the use of a higher cost Class 1 reference system. Again, statistical analysis of any variation with time can allow corrections to be applied in post-processing, or to alert to any faults or failures.
The typical measurement range of these applications is mostly within the capability of a good quality MEMS device, which may have a noise floor approaching 30dBA.
MEMS microphones are now being used in conjunction with traditional microphones, not for primary measurement, which is done by the condenser microphone, but to augment the measurement with other data, such as direction. The SV200A from Svantek has an array of MEMS sensors around a Class 1 outdoor microphone, so the source of noise may be determined both laterally and vertically.
And lastly, MEMS microphones are now being introduced into primary noise measurements, traditionally the domain of condenser microphones. For outdoor measurements, the noise floor is often a limitation, but by using more than one MEMS device, it is possible to reduce the noise component (by averaging the output of two microphones, the noise floor is reduced by nominally 3dB, for four microphones by 6dB, etc). By having multiple microphones, an element of redundancy is introduced, allowing continuous monitoring even in the event of a sensor failure.
The packaging can be devised such that each microphone ‘unit’ is a self-contained transducer, with a known output independent of each microphone, making it much easier to replace in the event of damage.
The SV 307A is the world’s first Class 1 approved noise monitor featuring a MEMS microphone array (patented).
Cost
The use of DSP and multiple sensors adds cost to the final result, such that the main benefit of a MEMS sensor, namely price, is seriously eroded. Therefore, we have to consider the additional benefits that the MEMS approach brings such as ruggedness, redundancy and replaceability. After all, there’s not much point in using MEMS for the sake of it, if a condenser microphone will do the job just as well, if not better, at the same price!
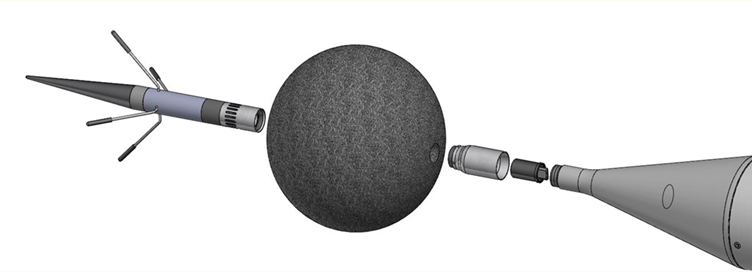
Figure 3: A MEMS transducer incorporated into an outdoor monitoring station – note the digital plug-in connector from the microphone ‘package’
Condenser microphones will continue to hold sway for measurements of extremely high or low levels, or for extremes in frequency.
However, for less demanding applications and for wide-area IOT measurement arrays, MEMS technology has irresistible advantages.
Calibration
Of course, no measurement is valid without some sort of calibration, either in the field or back in the laboratory.
Field calibration is relatively easily addressed by packaging the MEMS into a traditional ½” format, so a sound level calibrator can be used, with documented corrections.
In the calibration laboratory, it may be a different matter, as the sound level meter standard IEC 61672:2013 Part 3 involves testing of both acoustical and electrical responses of the meter. If the MEMS part of the microphone is a closed digital circuit, how do we isolate the electrical part of the circuit? The use of a specialised connector is required, to allow the signal to be injected into the analog part of the circuit (see the first illustration), so the DSP part can be measured in the conventional way. Perhaps the standards will evolve in the future to make this easier, but there’s always the fall-back of doing everything acoustically in an anechoic chamber!
Answer the question!
Going back to the original question posed, ‘Do you think we’ll ever see calibratable MEMS type chip mics capable of replacing half inch mics?’. The answer, as any fule kno, is Yes and No.
Yes, MEMS microphones are already replacing traditional condenser types in noise dosimetry and environmental noise measurements. MEMS technology also brings other toys to the party, such as directional information, and wide array measurement.
However, when it comes to replacing a typical IEPE microphone set for general purpose measurements, perhaps in automotive or aerospace applications, this may take a while, the reason being that there is no compatibility with existing front ends or power supplies. IEPE is an almost uniform power supply format for multichannel systems, so a MEMS transducer would have to comply with that, rather than the other way round.
But it’s not beyond the wit of man to come up with something that looks very much like a ½” microphone set, but has a digital output which could be fed to a widely compatible front end, like I2S or SP/DIF.